El kit para armar brazo robot de 6 grados de libertad con Arduino, fue diseñado para que en pocos minutos puedas controlarlo desde tu teléfono Android.
Puede utilizarse con fines educativos o aplicaciones especificas, utiliza la plataforma Arduino por lo que el código esta abierto para que lo modifiques si es necesario.
Antes de ensamblar el brazo robot debemos asegurarnos que todos los servos estén alineados a 90 grado, para hacerlo vamos a cargar el siguiente código a nuestro arduino que se llama "servos_90.ino"
Una vez cargado el código solo hace falta conectarlo al pin 2 como se muestra en el diagrama, y repetir el proceso para alinear cualquier servo
Una vez montado el servo 1 a la base y atornillado el accesorio del servo solo hace falta alinear el servo a 90 grados para pasar al siguiente paso.
Montar el servo 2 a la siguiente pieza y ensamblarlo a la base con un par de tornillos M3 8mm, tal como se muestra en la imagen.
Una vez unidas las dos piezas se debe alinear el servo a 90 grados antes de pasar al siguiente paso.
Colocar dos acesorios de aluminio a la siguiente pieza y asegurarlos con un par de tornillos m3 8mm tal como se muestra en las imagenes.
El ensamble hasta ahora se ve de la siguiente manera, es muy importante estar seguro que el servo este alineado a 90 grados.
Tomar las dos piezas de los pasos anteriores y tratar de ensamblarlo de tal manera que el brazo este a 90 grados
La siguiente pieza que vamos a unir es la siguiente y tiene 3 servos, los 3 servos se deben alinear a 90 grados al igual que en los pasos anteriores.
Con un tornillo m3 6mm se atornillara esta pieza con el anterior como se muestra en la siguiente imagen.
Por ultimo con el tornillo mas pequeño se atornillara el gripper como se muestra en la siguiente imagen.
Con esto quedara el brazo armado correctamente
Colocar los separadores de nylon al arduino y fijarla a la base de acrílico.
Asegurar el brazo con 4 tornillos M3 10mm con sus respectivas tuercas.
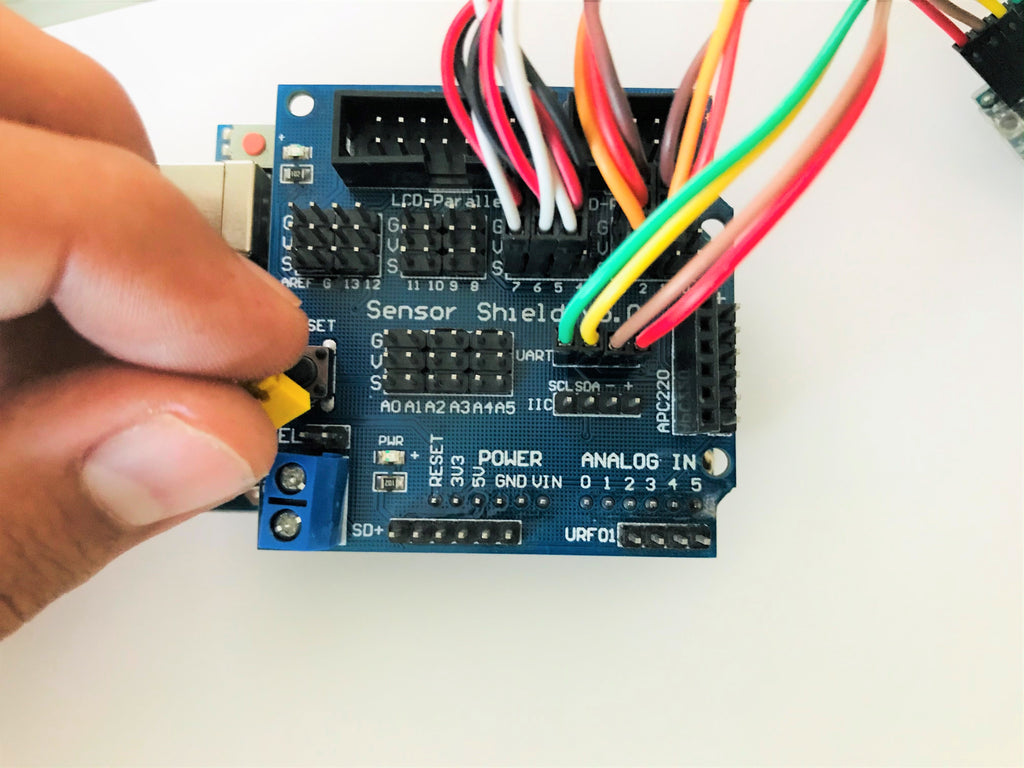
Una vez que este fijo el arduino y el brazo solo hace falta colocar el sensor shield para comenzar con las conexiones.
Conexiones
para las conexiones los servos quedaran enumerados de la siguiente manera:
Servo 1
Servo 2
Servo 3
Los cables del servo 3 y 4 se pasan por el orificio que tiene el brazo y para la conexión utilizaremos un par de extensiones para servo de 15 cm
Servo 4
Al igual que el servo 3 para la conexión se usara una extensión de 15 cm para realizar las conexiones.
Servo 5
Para la conexión de este servo se utilizara una extensión para servo de 30 cm y se pasara por el orificio que tiene el brazo tal como se muestra en la imagen.
Servo 6
Para la conexión de este servo usaremos otra extensión para servo de 30 cm
Ahora solo falta subir el código
Conexión modulo BT
Es importante retirar el puente para no compartir la fuente de 5v entre el modulo bt y los servomotores.
Alimentación del brazo
para alimentar el brazo es necesario utilizar una fuente de 5V que sea capaz de suministrar 3A.
Para evitar que el micro se reinicie es recomendable utilizar una segunda fuente que sea exclusivo para la tarjeta arduino, de esta manera tendremos la alimentación para la etapa de control (tarjeta arduino) y otra para la alimentación de los motores( a través del sensor shield).
Programación:
La funcion principal que usaremos para realizar el movimiento del servo sera la siguiente:
La función tiene como nombre Mover_Servo y necesita 4 parámetros,
El primer parámetro sera para indicarle que servo queremos mover.
El segundo parámetro es el Angulo en que se encuentra el servo actualmente.
El tercer parámetro sera para indicar a que grado queremos llegar y
Por ultimo el parámetro velocidad es cuantos mili segundos tardara en moverse entre grado y grado.
El código que se tiene que subir se llama "Brazo_Robot_v2.0.ino" antes de subir el código final es necesario desconectar el modulo BT si no no se podrá cargar el código.
Conexion App
Lo primero que se tiene que hacer es descargar la app Robocon la cual esta disponible en iOS y Android
Una vez descargada la App al abrirla presionaremos el boton de bluetooth
Presionamos el boton de bluetooth y enseguida nos mostara los dispositivos bluetooth deberemos seleccionar "MLT-05"
Hola mi nombre es Bernardo soy un abuelo de 78 años con la cabezota un poquito dura,
me anime, y como me indico subí perfectamente el código “Brazo_Robot_v2.0.ino”me lo tomo muy bien previo de haber desconectado el"HC-05"
también ajuste perfectamente los servos a 90 g como pide el tutorial.
Bien revisado todas las conexiones, en la pantalla del celular aparece conectado y no transmite ningún movimiento….
Bueno muchas gracias por ayudarme








































Comentarios
Dejar un comentario