Introducción
Los motorreductores con engranajes que incorporan encoder pueden ser utilizados en robots y gracias al encoder podemos determinar tanto la velocidad con la que avanzara como calcular distancia y velocidad.
Desarrollo
En esta ocasión mediremos las RPM que nos puede ofrecer un motor 12V 600RPM.
Recursos material de apoyo
Material
- Arduino uno
- Motorreductor 12V 600RPM
- Fuente eliminador 12V
- Protoboard
- Cables dupont
Especificaciones
- Material del engranaje: Metal
- RPM: 600
- RPM nomianal: 350RPM
- Voltaje de funcionamiento (VCD):12 v
- Torque: 7 kg.cm
- Corriente de carga: 5.5A
- Corriente sin carga: 0.2A
- Tipo de encoder: Cuadratura magnético 11 ppr
- Reductor: 1:20
- Pulsos por revolución: 224
- Peso: 95.9 g
- Dimensión: 69 x ø 25 mm
- Eje: 12 mm
Encoder
El encoder magnético posee 11 divisiones y gracias al reductor 1:20 obtenemos 220 pulsos por revolución, aunque aunque para ser mas exactos son 224 pulsos por revolución.


Diagrama de conexión
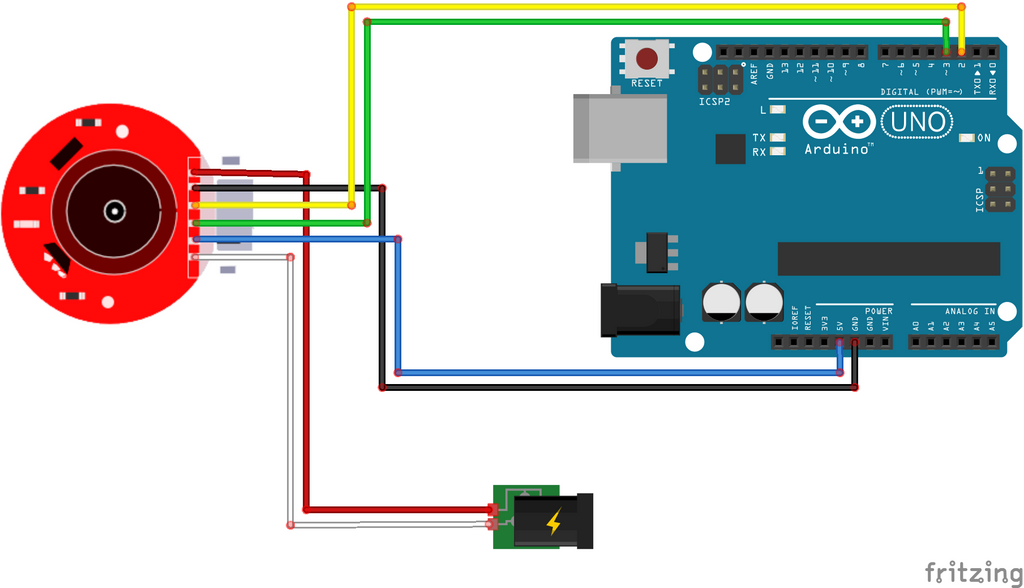
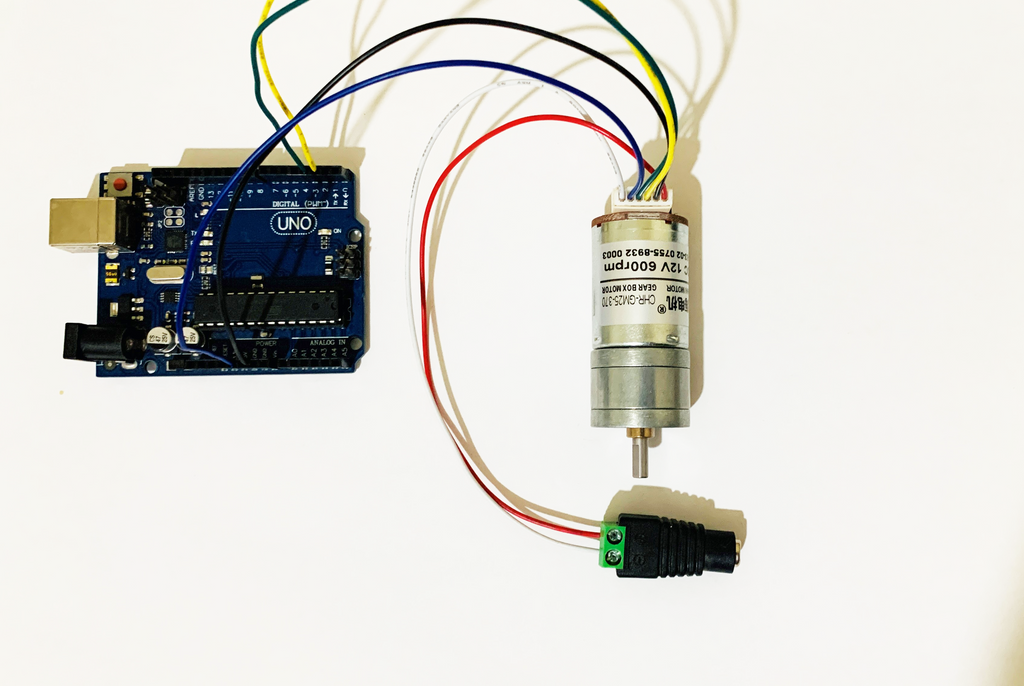
Conexión circuito
Código

Comentarios
Dejar un comentario