Talos Electronics presenta el Robot 3 en 1 v2.0, la nueva versión incluye un chasis en pcb, nuevos motorreductores con engranes metálicos capaz de girar a mas de 600 rpm.
Incluye nuevas baterías con capacidad de 8800 mah lo que garantizara muchas horas para practicar, incluye 2 módulos step-up para aumentar el voltaje de las baterías y lograr un voltaje estable.
Es ideal para todo tipo de personas que quiera aprender a programar sin tener que preocuparse de las conexiones de hardware.

Tutoriales de apoyo
Material
Antes de comenzar con el montaje de los módulos es importante cargar las baterías al 100% con el cargador incluido en el kit.

Baterías cargadas 100%
Ensamble
El chasis es una pcb con todo lo necesario para montar los módulos que harán de ellos un robot bluetooth.


Los motores ya estarán soldados y listos para montarlos y conectarlos en los pines color rojo respetando la polaridad, tal como se muestra en las siguiente imágenes(El positivo va hacia atrás del robot).
Hay dos opciones en el color de los motores



Colocar las llantas a los motores.


Colocar los módulos step up y asegurarlos con dos separadores de nylón.



Colocar las baterías.

El siguiente paso es muy importante y debe seguirse antes de conectar los módulos restantes.
Calibrar el step up de la izquierda a 12v tal como se muestra a continuación:
Calibrar el step up de la derecha a 7v tal como se muestra a continuación:

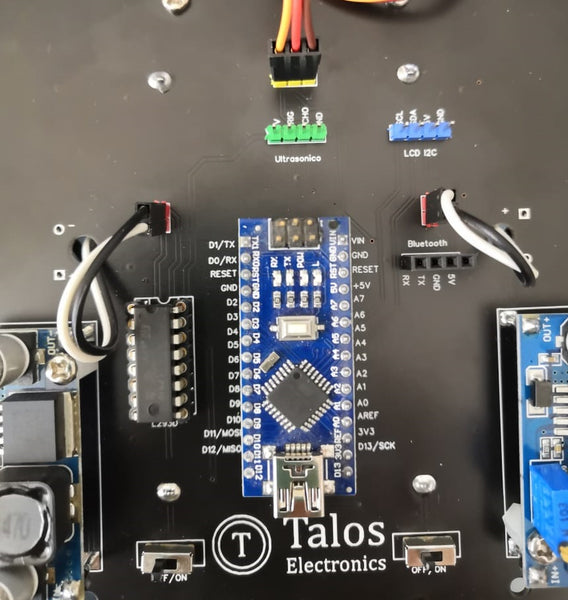
Colocar el puente H L293 y el arduino nano. Es importante colocarlo correctamente, en el integrado hay una pequeña muesca que es la que va hacia arriba.
Procedemos a conectar el puente H L293 y el arduino nano.


En la PCB viene marcada la orientación del arduino nano y el puente H.



Para armar el sensor ultrasonico sobre el servo necesitara las siguientes 4 piezas de acrílico.

Necesitaremos alinear el servo a 90° para colocar las piezas de acrilico
Procedemos a conectar el arduino nano a la computadora

Ahora cargaremos el programa
Código Servo 90°
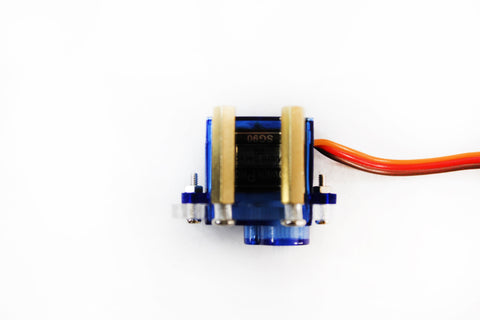
Una vez cargado el código en el arduino vamos a realizar la conexión del servo en la pcb, para eso recordemos las terminales del servo.

Lo conectaremos en los pines Amarillos de la PCB.

Ahora encenderemos los dos switch con las baterías puestas y el servo debe alinearse automáticamente.
Ahora con el servomotor a 90° empezaremos por ensamblar la pieza numero 1 al servomotor con 2 tornillos M2 y tuercas M2.

Colocar separadores de latón M3 de 20mm H-H.
Colocar el accesorio para servomotor a la pieza 2 de acrílico 
Colocar la pieza 2 con la pieza 3 de acrílico.

Ensamblar la pieza anterior a la flecha del servomotor como se muestra en la siguiente imagen:

Colocar el sensor ultrasónico con separadores de 12mm H-H a la pieza 4 de acrílico.

Colocar el sensor junto con el servo al chasis como se muestra a continuación.

Colocar separadores a la rueda W420, la rueda delantera lleva separadores de 6mm M-H

Repetir el proceso para la rueda trasera solo que en esta ocasión lleva separadores de 8mm

Colocar ruedas a los motores

Por ultimo conectar el sensor ultrasónico con 4 cables Hembra a Hembra así como el servomotor a la placa.


Ahora colocaremos el modulo hm10 (bluetooth low energy)



Colocar separadores macho hembra a los 5 sensores TCRT5000
y asegurar con las tuercas m3


Colocar los sensores al chasis y asegurarlos con tornillos m3 de 6mm


Calibración de los sensores
Es importante calibrar los sensores, para hacerlo hay que colocar el robot sobre la linea y asegurarse que cada sensor se apague cuando pase por la linea y en el fondo debe estar encendido, tal como se muestra en la imagen:

¿Como subir el código?
Procedemos a conectar el arduino nano a la computadora
Enseguida debemos descargar la librería de Kits_talos_electronics

Una vez descargada descomprimir el archivo kit_talos_electronics.zip en la siguiente ruta documentos/Arduino/libreries/ y ahí descomprimir los archivos.
Una vez descomprimidos los archivos abrir el programa de arduino e ir a la pestaña archivos -> Examples -> Kit_talos_electronics y seleccionar el que dice Kit_3_en_1.

Lo que sigue es seleccionar la placa arduino nano y en puerto seleccionamos el puerto serie COM10 (el puerto COM puede ser diferente)

Por ultimo subimos el código con el botón.

Calibrar PID
Un controlador PID es un mecanismo de control por realimentación ampliamente usado en sistemas de control. Este calcula la desviación o error entre un valor medido y un valor deseado, y ejecuta una acción para ajustar el proceso.
Las ganancias del PID son la
- Ganancia proporcional KP
- Ganancia integral KI
- Ganancia derivativa KD
Partir de la velocidad deseada, como valor de referencia es recomendable usar 50% de la velocidad máxima (255)
Dejar KI y KP = 0 y ajustar KP para que no se salga de la linea.
Si el robot oscila de un lado a otro se recomienda disminuir KP.
Con KI = 0 aumentar KD para reducir oscilaciones
Una vez que el robot es bastante estable en la línea siguiente, asigne un valor de 0,5 a 1,0 a Ki
Calibrar motores
Si el robot no avanza en linea recta solo basta con compensar uno de los motores.


Podemos usar las siguientes funciones en el setup():
- robot.compensar_motor_izquierdo(-20);
- robot.compensar_motor_derecho(10);
Instrucciones para usar la app
El primer paso sera descargar la app la cual es disponible par android y iOS
PlayStore https://play.google.com/store/apps/details?id=air.com.elegoo.elegooTool&hl=es&gl=US
AppStore https://apps.apple.com/us/app/elegookit/id1441940983
Una vez descargada la app es necesario tener encendido el modulo bluetooth
Enseguida abre la aplicación

Enseguida se presiona en el menu Robots y hacer scroll hacia a abajo para buscar el "Smart Robot Car Kit"

Enseguida presionamos Control remoto

Nos aparecera los controles que usaremos para controlar nuestro kit, entre ellos tenemos el joystick para poder controlar la dirección en la que se movera el robot.

Despues se presiona cualquier boton y enseguida nos mostrara el mensaje "El dispositivo no está conectado" enseguida presionamos confirmar

Enseguida intentara conectarse al robot, para realizar la conexión con el modulo HM10 es necesario presionar el botón ubicado en la esquina superior izquierda.

Enseguida nos mostrara las siguientes opciones, de las cuales podremos elegir nuestro modulo hm10

Al seleccionarlo intentara realizar la conexión con nuestro robot y nos mostrara el mensaje que la conexión ha sido realizada con éxito.

El botón azul nos sirve para poner el robot en modo seguidor de linea.
El botón Amarillo nos sirve para poner el robot en modo evasor de obstáculos.










Dejar un comentario